关于数控机床NC代码IJ报警深度解析(原创)
我是安周
相信每个编程和调机都遇到过机床报警圆弧误差,下来我用数学证明一下,当然有很多种办法走圆弧 ,R 或者点位坐标
I、J、K 为起点B指向圆弧中心O的向量;
I、J、K 分别对应X、Y、Z轴方向;
I、J、K 带符号,指向X、Y、Z轴正方向时为正,指向X、Y、Z轴负方向时为负。
我做了一个数学模型
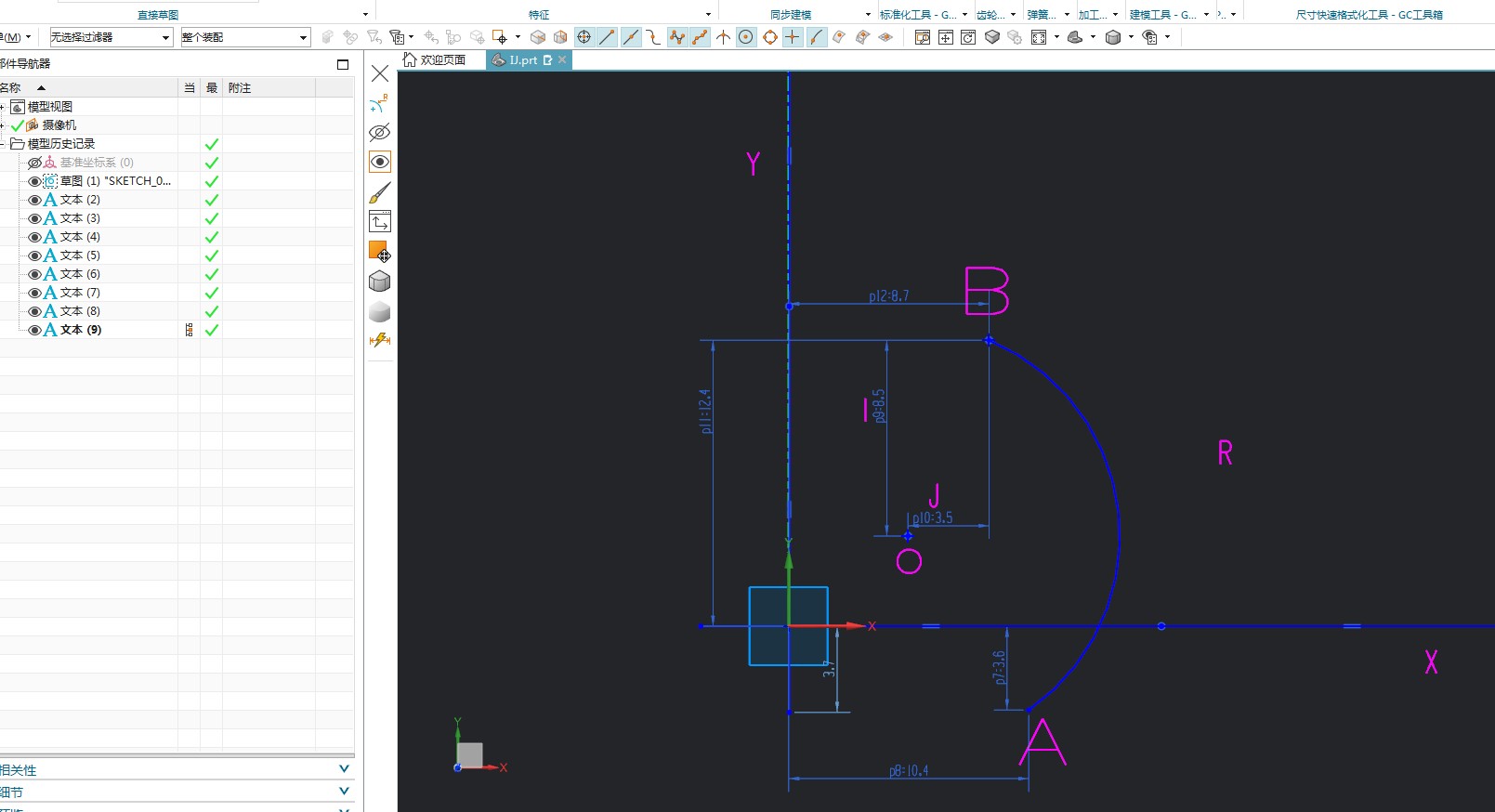
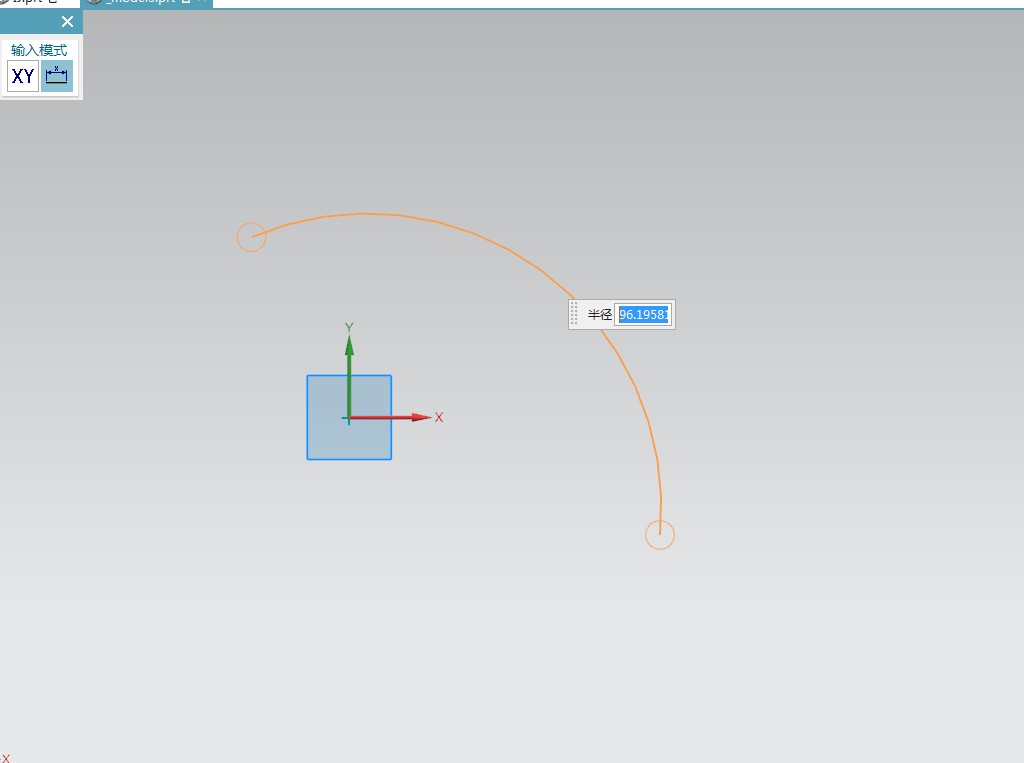
以半径R做点B到点A的圆弧运动
点B (P12,P11) 点BA(P8,P7)
I (p9) J(p10)
从图中可以看到 OA=OB=R=√I²+J²
现在我在NX中标注一个R,因为这个R是已知的 OA=OB
现在处于过约束状态,其实机床在走IJ就是一个过约束状态(三销定位),过约束需要一定的误差,间隙,弦差,机床有一个圆弧误差参数,当超出误差值就会报警。
下来说说计算机浮点问题,这是导致报警直接的原因
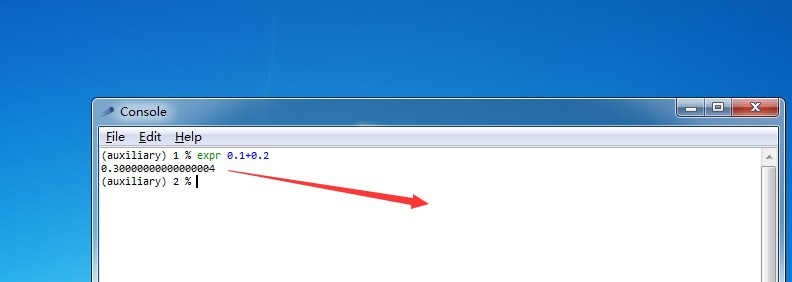
0.1+0.2的运算
首先,要站在计算机的角度思考 0.1 + 0.2 这个看似简单的问题。能被计算机读懂的是二进制,而不是十进制,先把 0.1 和 0.2 转换成二进制看看:
0.1 => 0.0001 1001 1001 1001…(无限循环)
0.2 => 0.0011 0011 0011 0011…(无限循环)
双精度浮点数的小数部分最多支持 52 位,所以两者相加之后 0.0100110011001100110011001100110011001100110011001100 因浮点数小数位的限制而截断的二进制数字,这时候,再把它转换为十进制,就成了 0.30000000000000004。
0.1+0.2其实不等于0.3的,只是取决于我们需要的小数位数。
一般三轴机床用小数点2位在大多数,笔者见用过3位小数报警的机床。
+0.0046
-0.0046
这两个值当取小数点2位,都等于0,其实它的误差已经是0.0092
用IJ走圆弧需要一个起点(X1 Y1) 终点(X2 Y2) 圆心(X Y)
需要6个坐标,最坏的结果就是误差累计导致的终点坐标不在圆弧轨迹上,直接导致报警,这其实是求点在轨迹上的一个运动做判断。
那么解决的办法当然很多,这里简单的介绍一个思路,需要加强一下后处理这块。
用已知R OA OB 半径 ,起点, 终点 反求IJ 用NX提供的IJ和计算的IJ各取两位小数做判断 误差取决于机床圆弧误差,超差就取运算的值。
这里有一个技巧就是 将这些值在运算之前先升幂(X*10^n) 计算完之后再降幂(X*10^-n),0.03变为0.3或者更高 计算完不要忘记降幂,可以很好避免由于计算误差带来的小数位舍去 !
这个思路主要是计算机浮点带来的问题,从根本上已经解决了浮点舍去的问题。
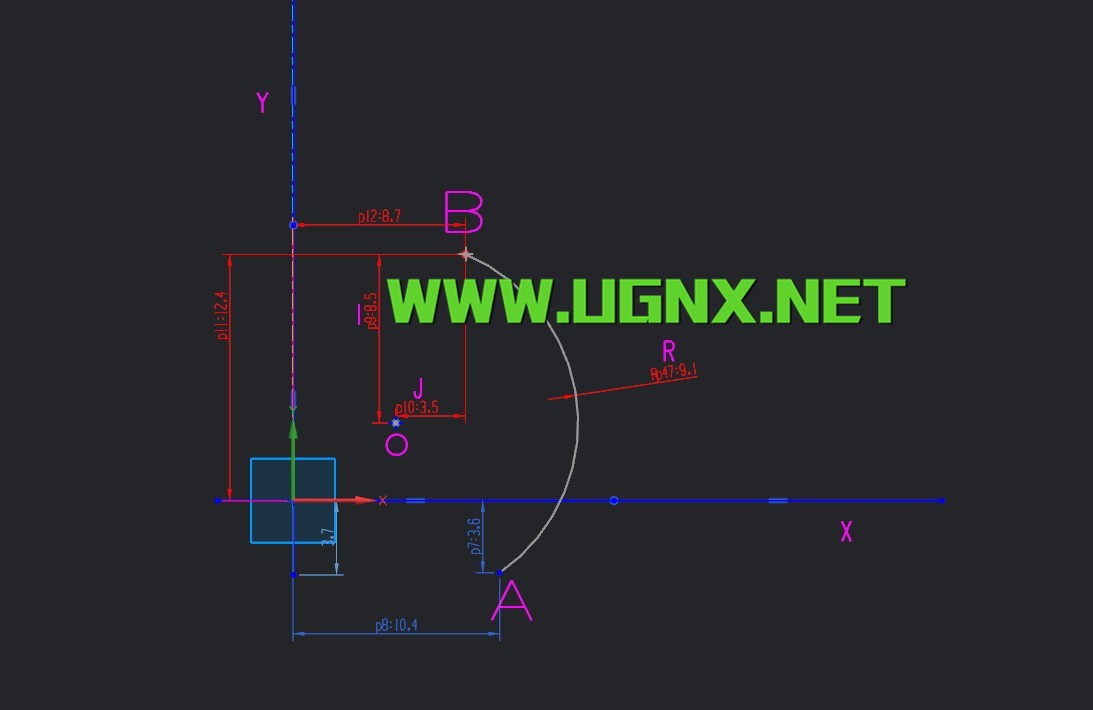
在这我顺便说说为什么用R不会报警,因为已知两点可以做无数条圆弧,不构成过约束,允许有误差。
在海德汉上面,走圆弧至少有4种方法 可以用极坐标走PA的形式,指定起点,指定R 指定角度 即可完成! (当然海德汉一般最少3位小数,笔者用的4位)
在海德汉530上面PI=3.142 在640上面 PI=3.141 这个也是海德汉升级之后一个大提升。
- 发表于 2019-04-30 11:09
- 阅读 ( 15072 )
- 分类:NX编程(三轴)