NX五轴3+2编程合并刀路解决方案(多轴)
从NX1847版本当中新增了一个五轴合并刀路,可以看下我前期分享的,但是一直没有3+2的合并方案,一般的处理方式都是回安全点,今天分享两个思路,这个功能很多CAM软件都有,就当是人无完人吧!学...
从NX1847版本当中新增了一个五轴合并刀路,可以看下我前期分享的,但是一直没有3+2的合并方案,一般的处理方式都是回安全点,今天分享两个思路,这个功能很多CAM软件都有,就当是人无完人吧!学习一个软件不易,且学且珍惜!慢慢发掘它的功能。
分享将是我唯一的动力!
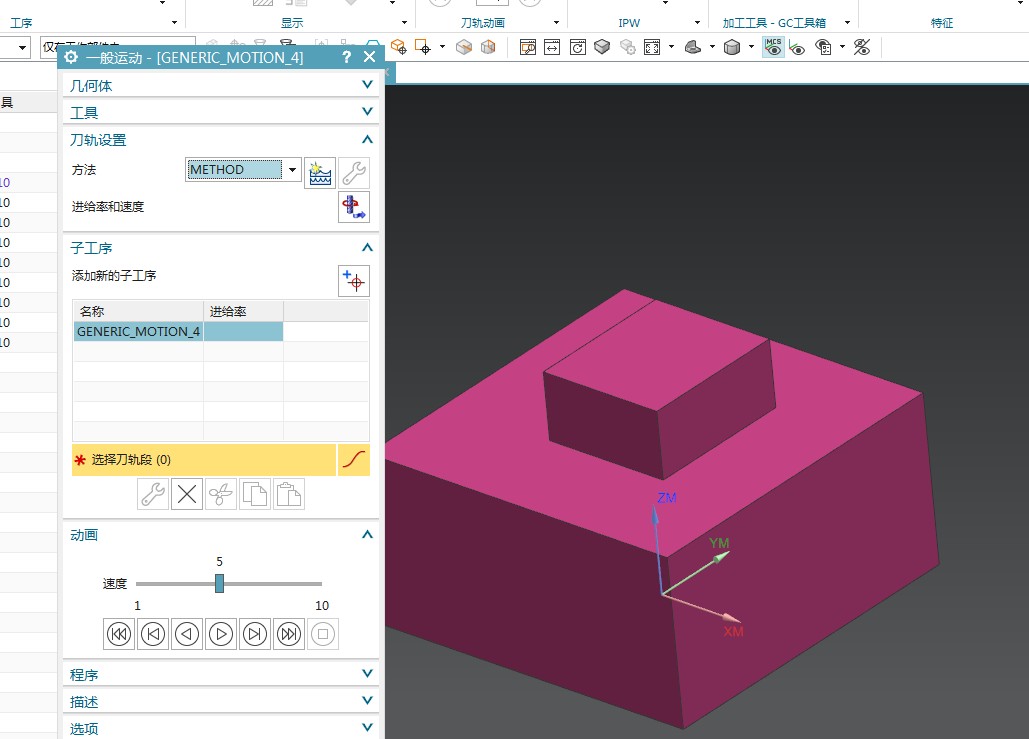
1:编程上解决
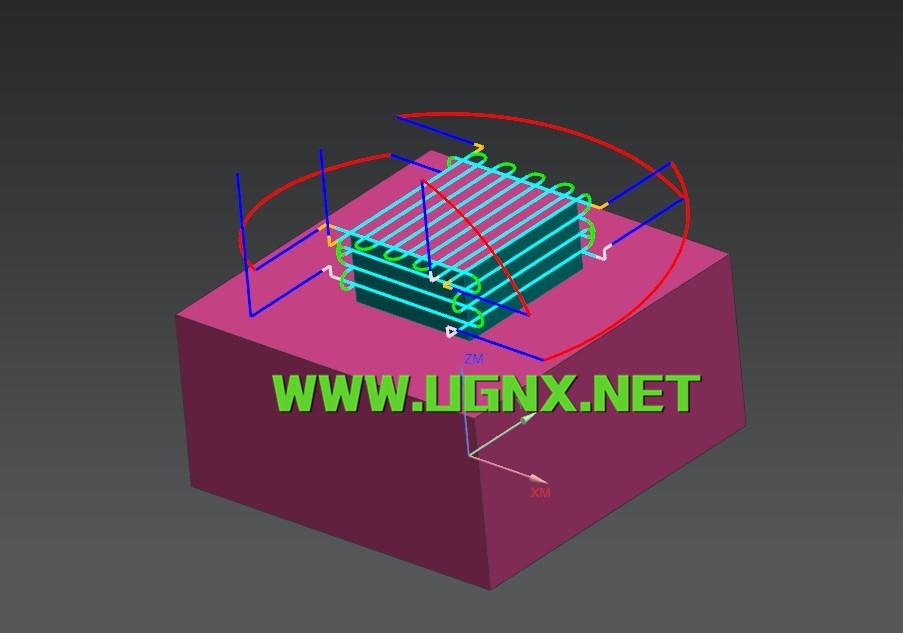
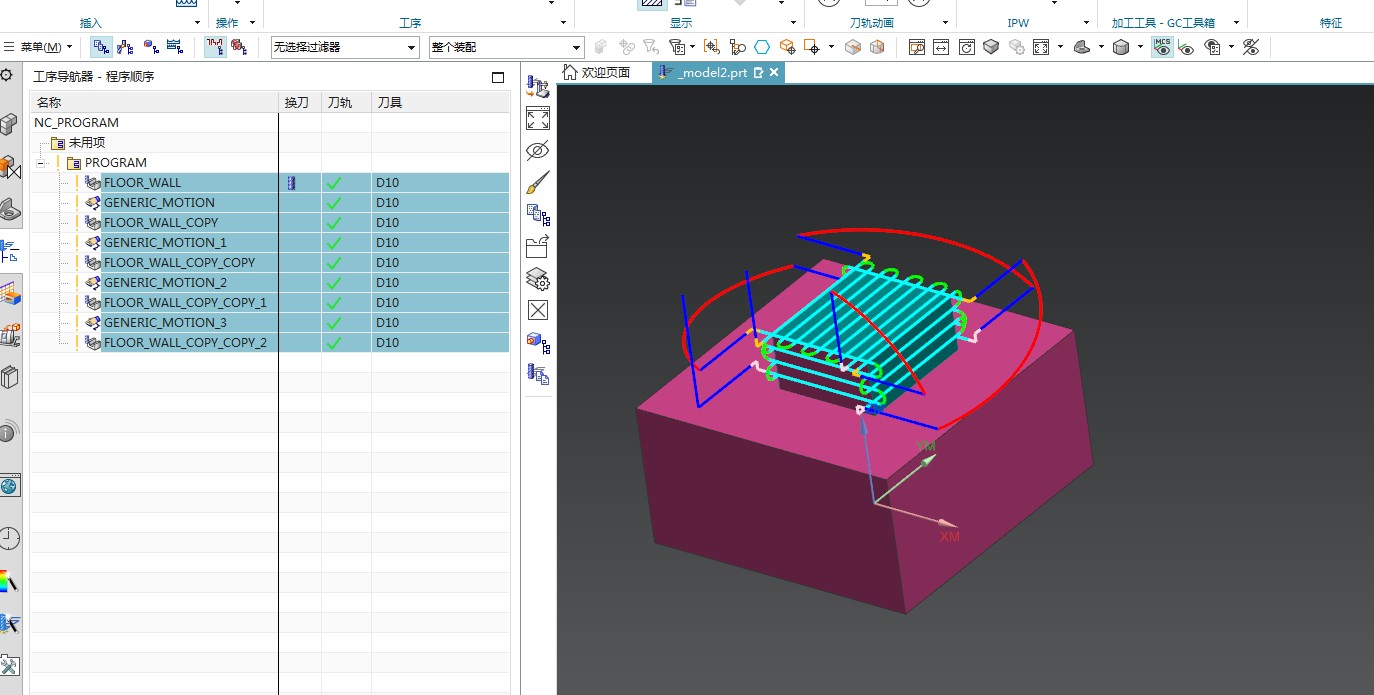
用一般运动控制,顺便说说这个相对下一个思路的好处,刀路直观,安全,后处理实现相对简单,缺点就是编程稍微麻烦。
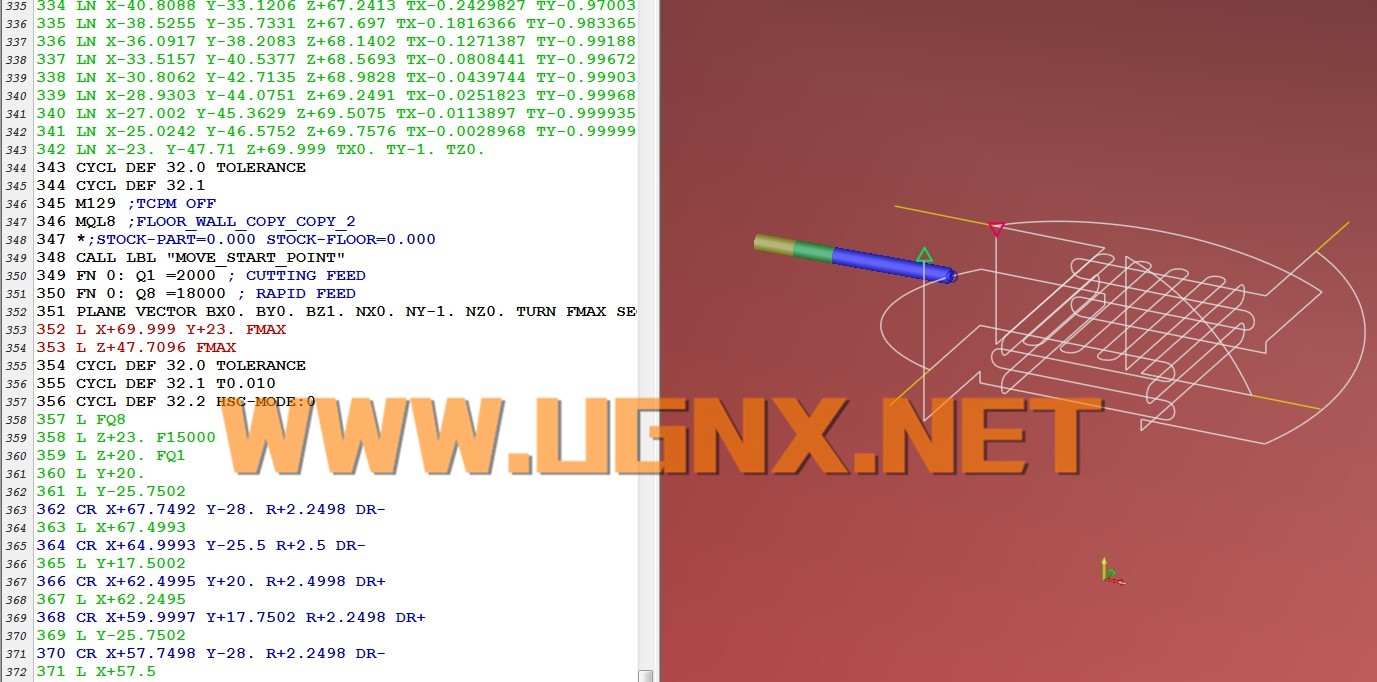
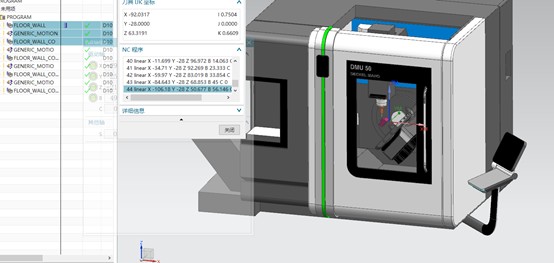
2:完全取决于后处理
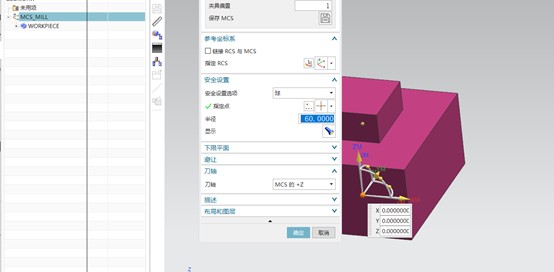
第一步,设置坐标系安全设置为球,这一步的意义很明确,就是给后处理传参变量,球半径R。当然可以是方块。
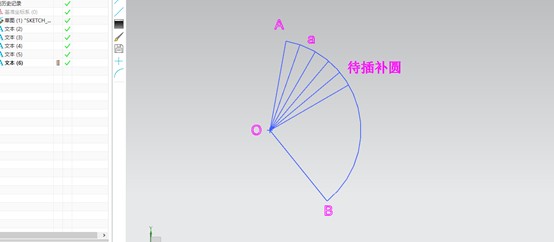
第二步直线轴处理:后处理读取刀路之间的起点A与终点B坐标以及向量IJK,这时已知球半径R和起点A终点B和球心O,三点构成一个平面P,用轨迹方程求出以R为半径起点A到终点B的空间圆轨迹和圆的弧长L以及圆心角θ,以步长a来插补圆周轨迹,便可计算出插补步数,记作插补步数为N, a为插补的分辨率,可以基于公差控制弓高,计算出a
这个思路的好处就是不用做很多辅助刀路去连接,以安全球为参考做球面的圆轨迹。
这里的圆周插补可以参考一下我前面发的极坐标插补算法思路,需做射影转换到新平面P.
就近原则:当圆心角大于180的处理方式,用圆的弧长公式l=nΠr/180,便可解决那一条路径最短,当圆心角等于180默认以笛卡尔坐标右手法则处理。
安周
2019-8-1
- 发表于 2019-08-26 21:45
- 阅读 ( 18004 )
- 分类:NX编程(多轴)